

因為我不是機械本科出身的,只是興趣使然才整理設定,若有錯誤之處希望大家幫忙指正,同時這篇文也不會太艱深,我會以大家(包括我自己)都看得懂為目標努力。
以下附上兩個參考資料:
一.前言
AMBAC是宇宙世紀中MS被採用的原因之一,藉著擺動手腳來在不消耗推進劑的情況下幫助調整姿勢。
但AMBAC並不能移動機體的質心位置,只是讓姿勢制御噴口的效率提高。
本文會先闡明何謂運動性能,接著進行AMBAC原理的說明、與衛星的*反作用輪比較討論其現實中的實用性,最後會談論AMBAC肢的取捨。
*註一:
根據留言區的補充,其實反作用輪(reaction Wheel)在專業領域更常被譯作反應輪,因此之後都改稱為反應輪
二.機動性與運動性
機動性(mobility)簡單來說就是“快”,通常可以從帳面上的推重比略知一二,但實際上還會受到續航力、機體設計等影響。
機動性可以粗略分成三種:
1.前後移動
2.側向移動
3.迴旋(圓周運動)
我們從帳面數據可以推論的機動性僅限於主推進器的方向。
運動性能(maneuverability)則可以稱為敏捷度,跟機體調整不同運動狀態的效率有關,可以當成非常規的運動模式,類似轉動,但又更複雜一點。

姿勢制御噴口和AMBAC都會影響運動性,同時也會影響機體從直線前進到其他方向移動的效率,所以機動性的發揮會受到部分影響。

機動性不足的話運動性會失去意義,但並不是帳面上的推重比愈高愈好,隨著推力的提高,推進器的效率也在下降,例如薩克II改的推力增加了70%,續航力卻只剩1/2,而不是1/1.7。

除了續航力不足,如果相關技術不夠先進,還有難以瞄準目標(相對速度過大)、低操作性,再來就是成本問題。
以直線前進方向來看的話,機體的加速度在0080-0110年代大約1到2G,110年代以後才有明顯提升。
三.AMBAC的原理
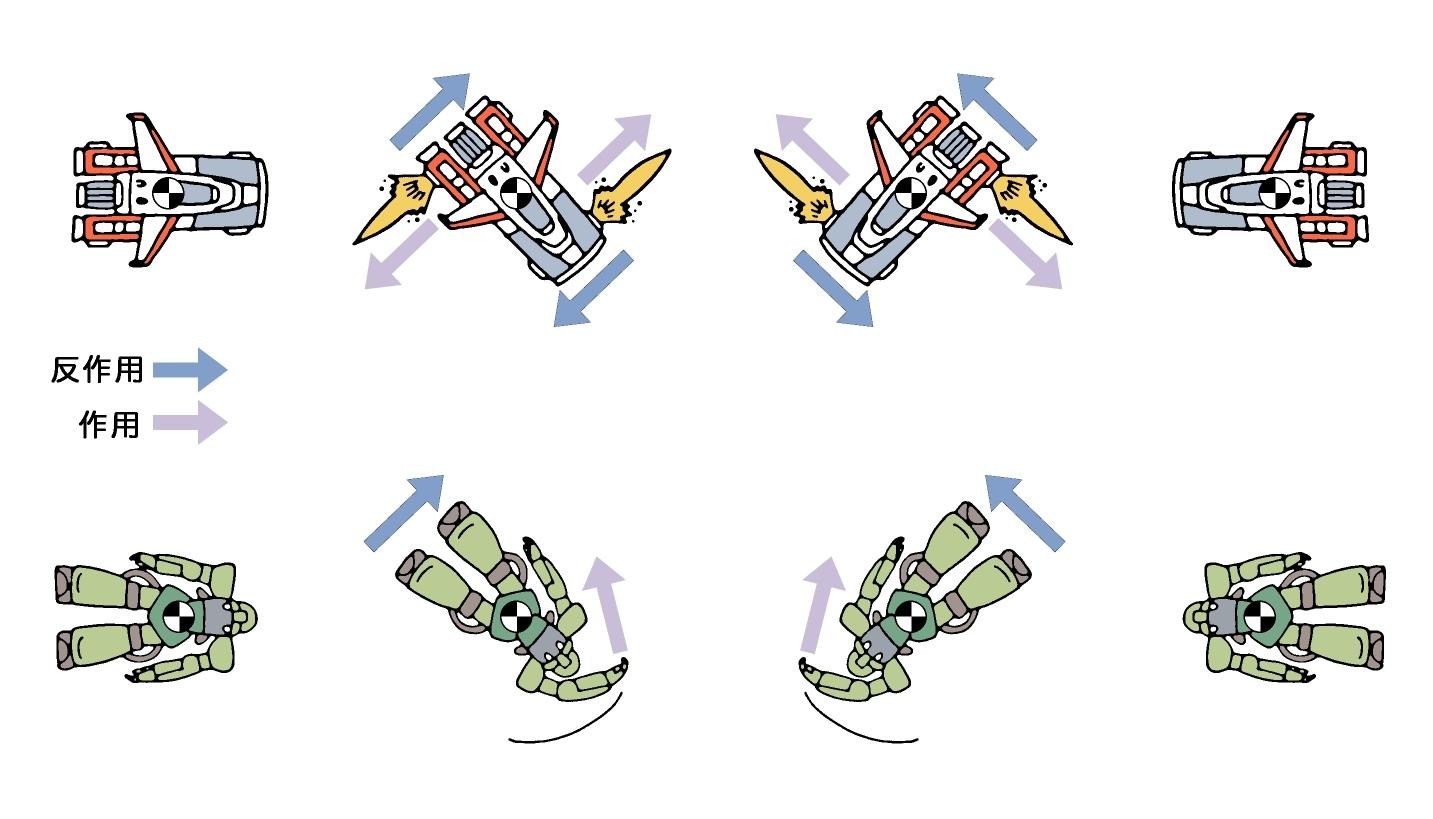
設定上說AMBAC是透過作用力與反作用力讓機體轉向,但這是指內力,不考慮推進系統等外力,機體擺動某部位的作用力與反作用力並不會改變質心的位置。
我認為AMBAC是靠著角動量守恆(擺動肢體)以及動量守恆(其他活動模式)來達成的。
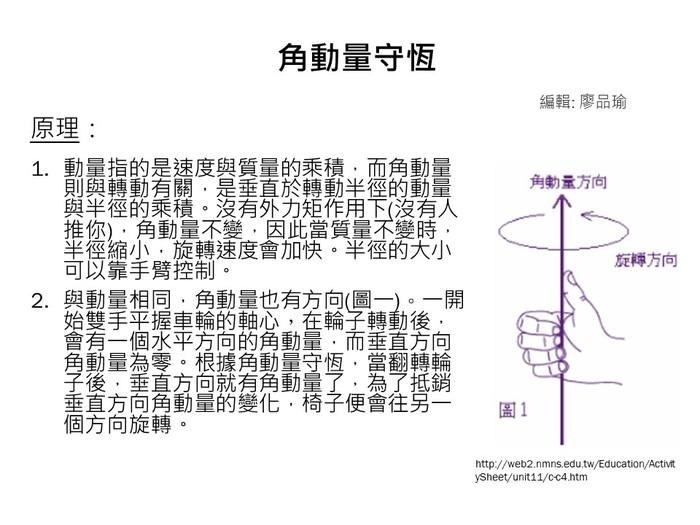
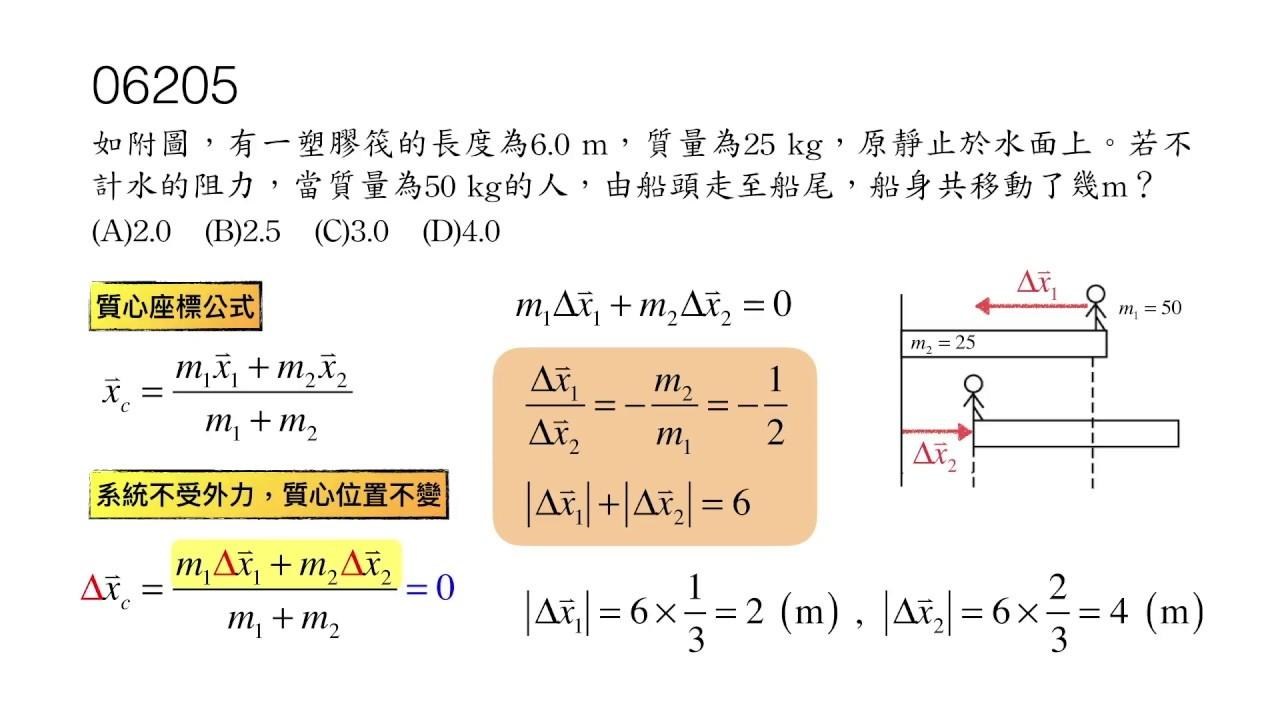
動量守恆的部分,用高中物理來舉例,就像是人在靜止船上行走,船會往相反方向滑動,直到人停止走動,以維持質心的位置,我認為AMBAC簡化到極致就是這個概念。
必須注意的是AMBAC肢只是提升姿勢制御噴口的效率,以及透過改變轉動慣量來進一步提升動作的精密性,純粹的AMBAC並不能讓機體“移動”。
四.衛星的反應輪
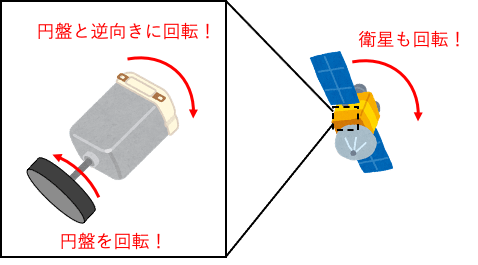
衛星上改變方向是透過反應輪配合小型推進器來實現的,反作用輪跟AMBAC很像,可以在不消耗推進劑的情況下控制衛星旋轉。
從原理上來說,反應輪也是靠著角動量守恆來讓衛星旋轉,通常在X、Y、Z軸的方向各安裝一個,以電力驅動。
在實際使用上,一次只會使用一個反應輪,透過細微地調整角度來達成高精度的旋轉,是個簡單實用的設計。
根據留言區的補充,為了保險起見,ADCS(姿態判定與控制系統 Attitude Determination and Control System)的反應輪會裝成斜的,這樣一個輪可以調兩個軸,三個反應輪掛一個也能達成三軸姿態控制。
五.AMBAC對比反應輪
從結構上來說,透過機械肢進行AMBAC遠比反應輪複雜得多,雖然就理論上來說AMBAC肢是合理的,但在實際設計方面目前有很多待克服的問題,包含控制效率、操作難度、設置位置等等。
AMBAC肢的好處:

1.除了擺動來調整角動量,還能靠關節的彎曲來調整轉動慣量
2.用途廣泛,可以安裝推進器,調整推力方向更靈活,或是安裝武器等
反應輪的好處:
1.可以精確控制機體的轉動
2.簡單可靠
六.AMBAC的抑制
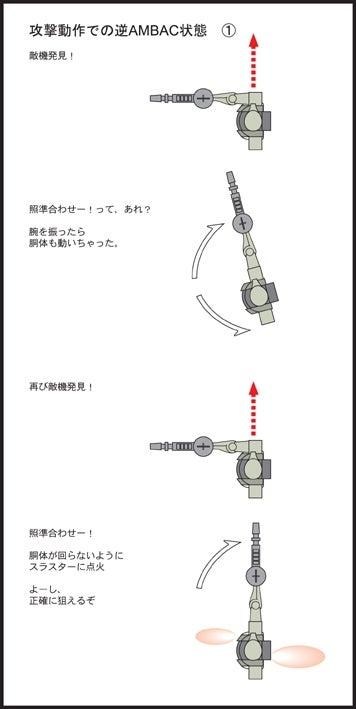
假設機體已經克服了AMBAC的技術瓶頸,並且能靈活運用,但並不能每個動作都讓機身改變方向,所以在應對拿取物品(例如抓取武器)以及使用武器瞄準時,機體內部應該會有抑制方向改變的機制。
個人認為應該包含噴口的控制、骨架內部類似反應輪的結構,以及其他部位AMBAC的連動。
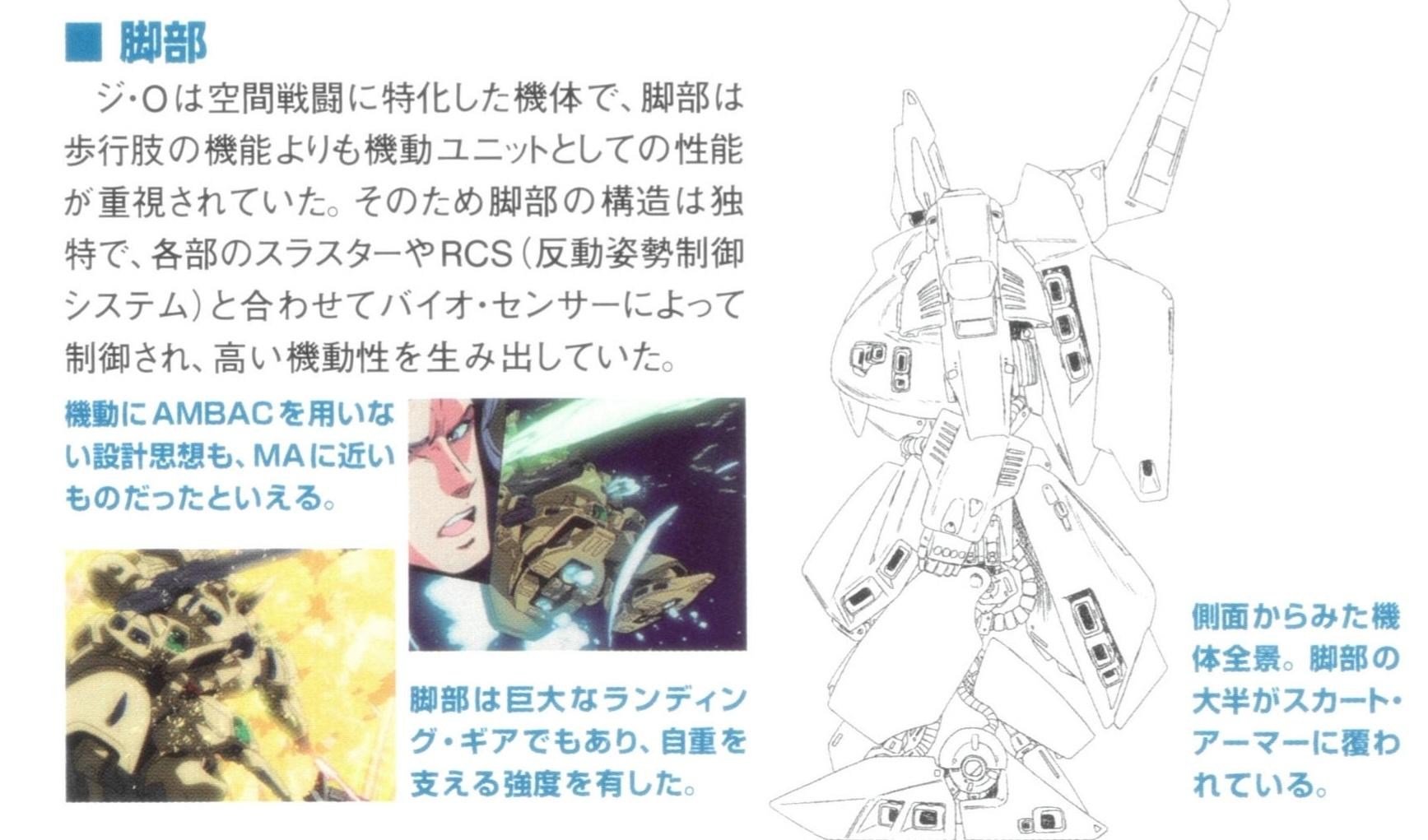
從The O的設定中有提到“反動姿勢控制系統”,在主要依靠姿勢制御噴口而不是AMBAC的The O身上可以幫助控制姿勢。
個人推測這或許是安裝在機體內部,類似衛星的反應輪的結構,可以透過安裝在特定的位置和控制旋轉角度來進行姿勢制御,又或者是抑制機體的某些動作帶來的影響。
或許在宇宙運作的MS都有類似的機構,只是The O的在效率上有刻意被強化過所以設定才會提及。
七.額外AMBAC裝置與姿勢制御噴口的取捨
AMBAC的效率與可動骨架的設計有關,還涉及到反應速度等等,提升運動性能可以靠增設噴口和增加AMBAC肢。
1.額外AMBAC裝置
優點:噴口的姿勢制御效率提升,在安裝更少推進器的條件下提高運動性能,配備適當能讓機體輕量化。
缺點:
效率受到時代限制(當成骨架的特化型來看)、增加操縱難度、整備和配備成本高、安裝過多會讓結構複雜化,也更脆弱。
MS Bible之中對可動骨架等級與AMBAC效率的舉例:
2.增設噴口

優點:
操縱系統得宜的話受到可動骨架的技術限制小、結構相對來說不會太過複雜
缺點:
燃料耗費大、機體增重、整備成本高等等。
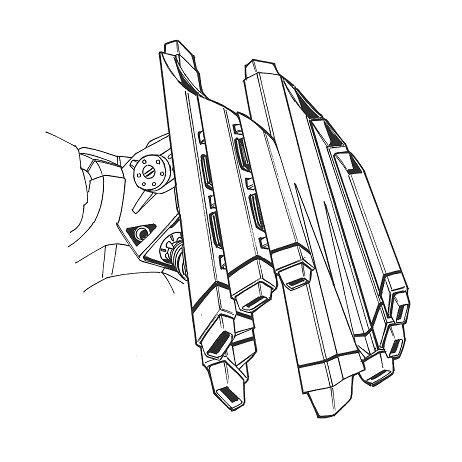
八.為何The O幾乎拋棄了AMBAC

AMBAC雖然可以提升噴口控制姿勢的效率,但如果要把運動性能提升到極致而大量設置AMBAC肢,機體會變得很臃腫,複雜的結構故障率也更高。
或許是西羅克意識到了這一點,再加上反動姿勢控制系統的獨自改良和bio sensor帶來的高反應速度,西羅克才選擇了大量增設推進劑槽和噴口,再靠著重裝甲來保護的設計。
The O的設計在幾十年後看來或許不是好的(就各項成本和推進劑的消耗來說),但這應該是當時要提升運動性能到極致最好的方法了。
















 電梯
電梯