寒假開始幾天了也該有點進度了
上次做到行走
接著把其他地方做出來
由於砲塔迴轉用能無限迴轉的360°舵機就行
只是要找到剛好的齒輪很難
結果跑去電子材料行剛好看到5mm的金屬齒輪 跟舵機的輸出軸差不多
加點三秒膠就能完成
砲塔部分加上砲塔環 用的是皮帶輪的皮帶
因為內齒的齒輪很難買才用這代替
黏上去倒是黏很久
試運轉 還行 不過聲音有點吵就是
到這邊就是接收器直接輸出就可以的部分
接下來要弄的是 砲縮 俯仰 車燈&機槍
這部分用arduino nano來做
利用pulseIn函數讀值 去做運算
車燈和機槍燈是差不多的 只差在一個會閃
由於車燈是很小的 所以使用smdled
跟我的大和探照燈用一樣的呢
由於太粗的線會不好焊(我自己是這樣啦)
所以用了很細的漆包線
田宮的虎王沒有開出車燈的線 剛好漆包線可以代替啦
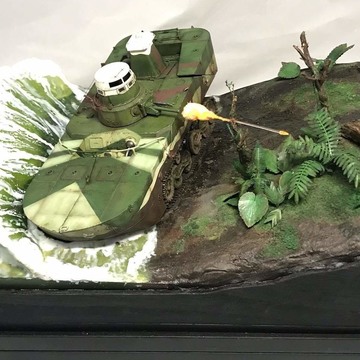
再來做砲縮 先加工砲管本身和砲盾
在砲管裡面裝上一顆白光led
砲管定位孔切掉 加上銅管 電線從這裡拉出來
砲盾擴孔 砲座加工讓砲管銅棒可以很順的前後簡諧運動
![]()
組合起來 這是一開始的版本
因為後來會卡到 所以我把舵機換到旁邊了
接上arduino 測試
再來就是俯仰了
我在砲座旁邊黏了兩根塑膠棒 並在舵機的舵臂上拴上螺絲
大概效果 我覺得還可以啦
到目前就這樣
之後要整線 焊一個集線座放在砲塔裡面
還有機槍的led
應該能完成吧大概